Vibration Isolation

Comparison of frequency responses from system model and measurements.
Goal - Isolation of Speaker from Perturbations at Base
2021 - Final project for mechatronics class, taught by Professor Trumper in the Department of Mechanical Engineering. Final class grade: A
The project was to design, build, and demonstrate a controller capable of isolating a geophone at the speaker center from perturbations at the base. On the left is a video of the speaker platform with the prototyped controller. Here, the geophone acts as a velocity sensor, measuring vibrations. The voice coil speaker acts as a linear motor. The controller drives and controls the voice coil to isolate the geophone from movement at the platform’s base.
Contributions:
Developed a system model of the speaker, geophone, and electrical parameters (input voltage, power amp, disturbance, geophone output, etc).
Adjusted model parameters by comparing model with measurements of actual plant transfer function.
Designed controller (s-domain, by hand). Simulate plant response to controller in Matlab.
Build controller as analog circuit interfacing with digital components (LabVIEW). Test controller, iterate design. Distributed amplifier between analog and digital domains to minimize impact of noise. Selected op-amp components to achieve desired bandwidth.
On the left is the video of the results. There is a slight lag between the base motion and speaker response. The lag is the result of a bug introduced where the computer samples the analog circuit output. Unfortunately, the bug was not caught in time before recording the video.
Vibration Isolation - Plant

Project goal - design a controller to control the speaker and isolate vibrations at base geophone at top.

Bond Graph mapping the speaker's mechanical and electrical components - masses, resistive elements, capacitances, sinks, and sources. A step in the design process was to develop the state space equations capturing the speaker dynamics, for simulating the controller function in MATLAB. I created this bond graph using a schematic of the speaker elements, and from that bond graph, the state space equations for MATLAB.
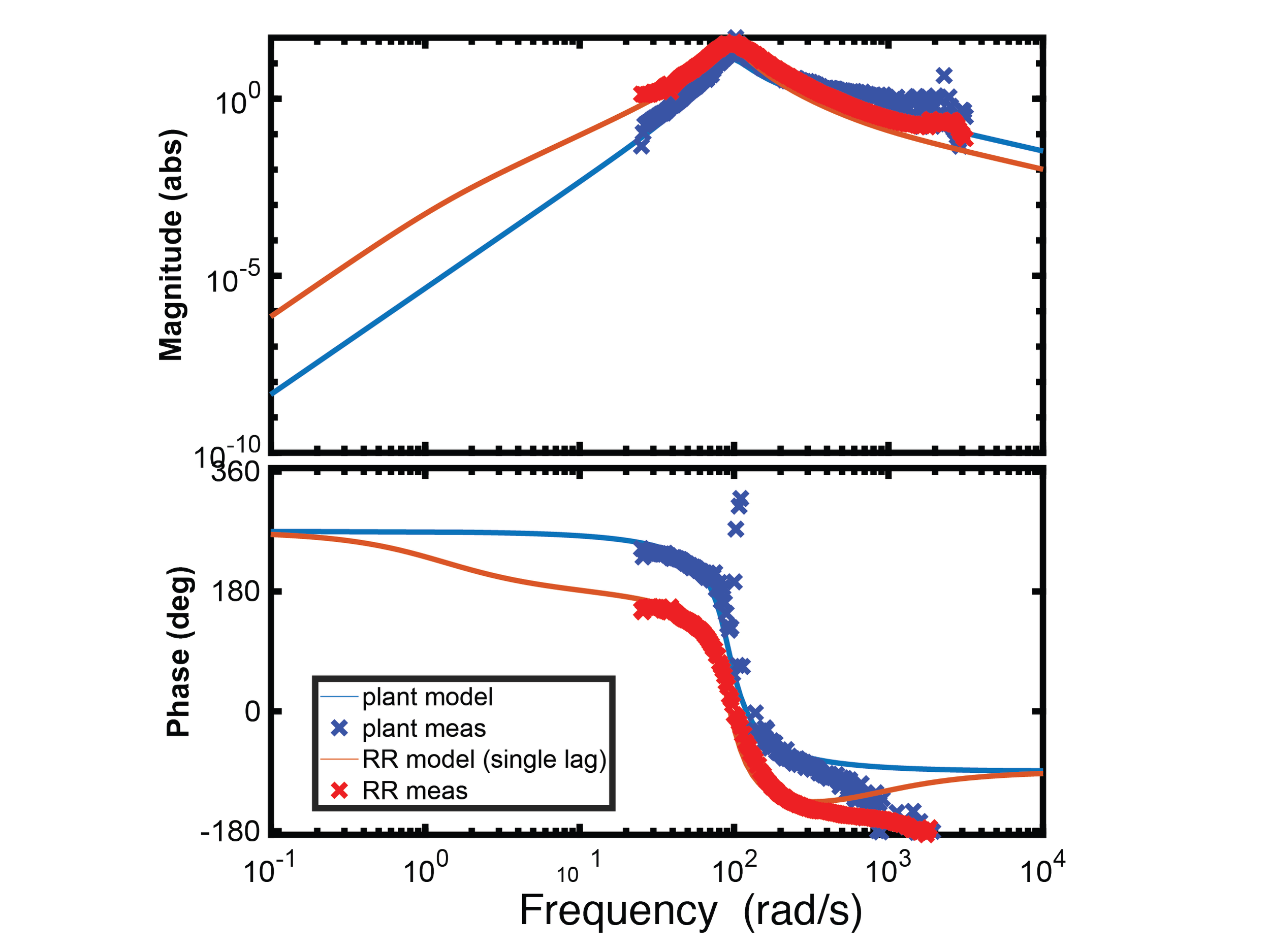
Speaker frequency response (measured) versus simulation using state space equations and dynamic model captured in bond graph. Figure also shows start of controller simulation - in this case the effect of the first lag controller.
Controller Design

Feedback control loop showing speaker (Plant), and filters. The plant connects to the circuit. LabVIEW routine uses difference between geophone output and reference to mitigate effect of disturbance.

LabVIEW Controller (lower box)

MyRIO module integrated with breadboard. Breadboard contains circuit of filters (anti-alias, loop shaping, lead) and gain and interfaces with plant and myRIO. MyRIO interfaces with computer and contains the LabVIEW routine with controller.

Matlab bode plots for each filter in circuit. Filters modeled separately and then together to understand contributions to response.