Sealab Search Robot
Spring 2011
Equip robot and program aquatic platform to:
use GPS to follow specified path and navigate to given coordinates
autonomously find beacons broadcasting range data
Mission Objective: Find three beacons located on Charles River in 20 minutes.
Practical Implications: Locate stranded persons, give location to search robot to follow.
Team Project for Class 'Design of Electromechanical Robotic Systems'
Team: Ned Burnell, Lauren Chai, Marie McGraw, Mukul Singh, Li Wu
Video (left): our project robot locating the beacon
-
Sensors - Marie McGraw
Mechanical Design - Lauren Chai, Li Wu
Acoustic Ranging Algorithm - Ned Burnell, Mukul Singh, Li Wu
Exploration Behaviors - Ned Burnell, Lauren Chai, Li Wu
MOOS Architecture - MOOS Architecture
Team Organization - Ned Burnell, Marie McGraw
Kingfisher M100 Platform - Design strategy for mounting transducer and modem
My contribution: ideate design ideas, prototype, and test strategies
Kingfisher M100 platform came equipped to move and navigate via GPS. It had an onboard computer, batteries, thrusters GPS and compass. For this project, the platform needed an acoustic modem and transducers to ping the beacons After considering multiple options, the team settled on a WHOI Acoustic Modem from Professor Leonard’s Lab.
Design Considerations for mounting the modem and transducers
Operating Depth for transducer
Drag
Weight
Stability - Kingfisher was already stern heavy before additions
Center of Buoyancy
Entanglement Risk - keep sensor cable away from thrusters
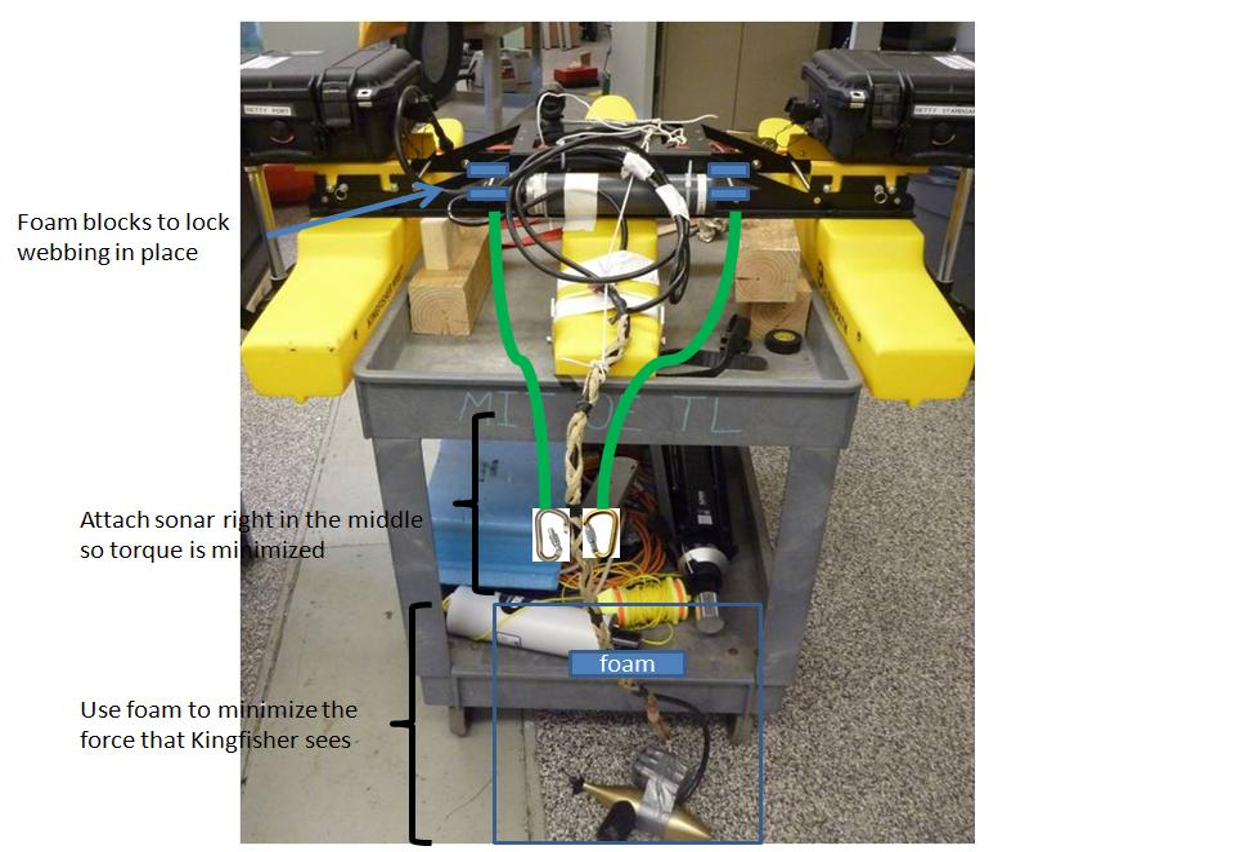
Final strategy for attaching transducer and model. Transducer and weight keep cable straight. Weight and equalized cords attached with carabiners keep the cable away from thrusters. Foam blocks offset weight of transducer block.
Two ideas were considered: 1) mount the transducer on an aluminum rod, and 2) mount transducers on cable with weight and equalized cords to keep the cable straight and centered.
Idea #2 was selected because it was
easier to transport compared to a long rod
more straightforward to attach to the platform
lighter - the combined weight of the transducer and added weight was 14 lbs, made neutrally buoyant with the addition of foam blocks.
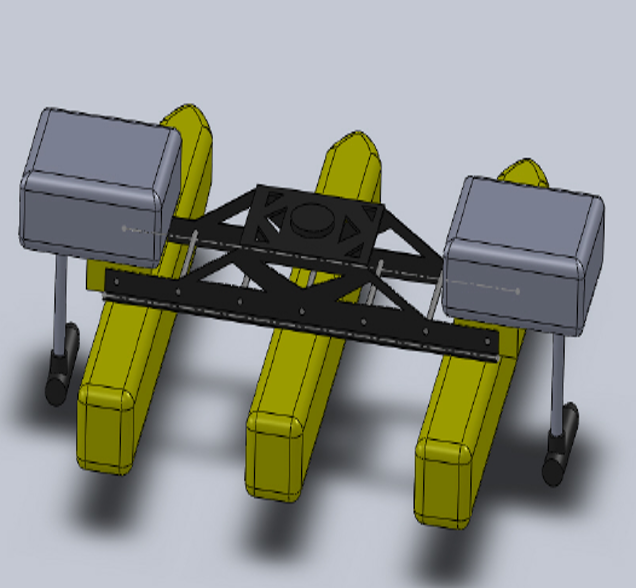
CAD model of Kingfisher (CAD model and assembly made by Lauren Chai)
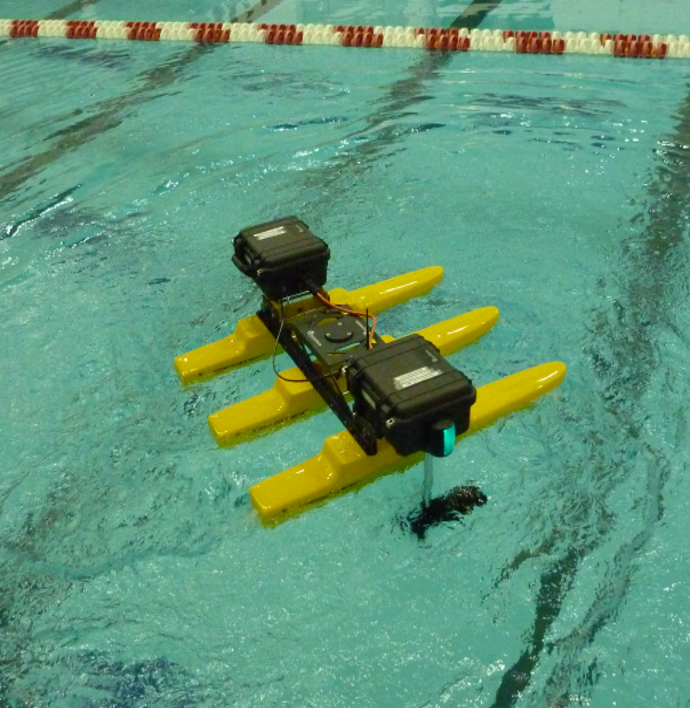
Photo from Pool Tests of Kingfisher. During tests, Kingfisher pitched backwards, before sensor attachments. Foam added to transducer to make it neutrally buoyant and avoid pitch instability.