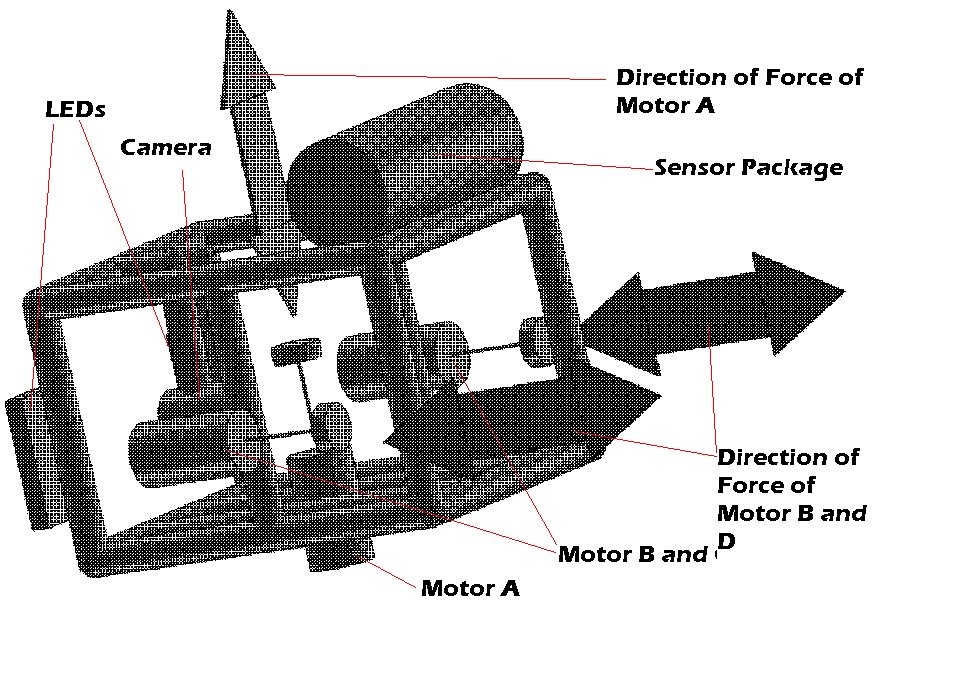
Photo of CAD model
Design/Build of Remotely Operated Vehicle (ROV)
February - May 2009
Team Project for Class ‘Fundamentals of Mechanical Design’, taught by Professor Alex Techet.
Project Goal: Design and build an underwater ROV for navigation underwater.
Team members: Lauren Chai, Sarah Cheng, Jack Weinstein
Final Design: ‘Boxfish’
Frame: Vehicle frame was constructed of 0.5” PVC pipe. Sensors contained in 2” PVC pipe, sealed against water.
Motion: Three Bilge motors enable vertical and horizontal translation and rotation about the vertical axis.
Stability: weight distributed to enable self-righting (Pitch and Roll). Yaw is controlled by motors B and C.
Control: PWM of motors. The controller is located in the sensor package container.
Personal Contribution: CAD modeling, motor placement, vehicle construction
Test Results: Tests were conducted in the Johnson Athletic Pool at MIT. The robot demonstrated the ability to move reliably forward. Further improvements are required to mitigate undesired tilt and reduce entanglement risk. The off-axis center of buoyancy, force from the tether, and motor assembly resulted in constant clockwise motion.